布局形式输入输出同轴
安装形式立式卧式
级数单级
用途工业机器
材质钢
包装原厂纸箱
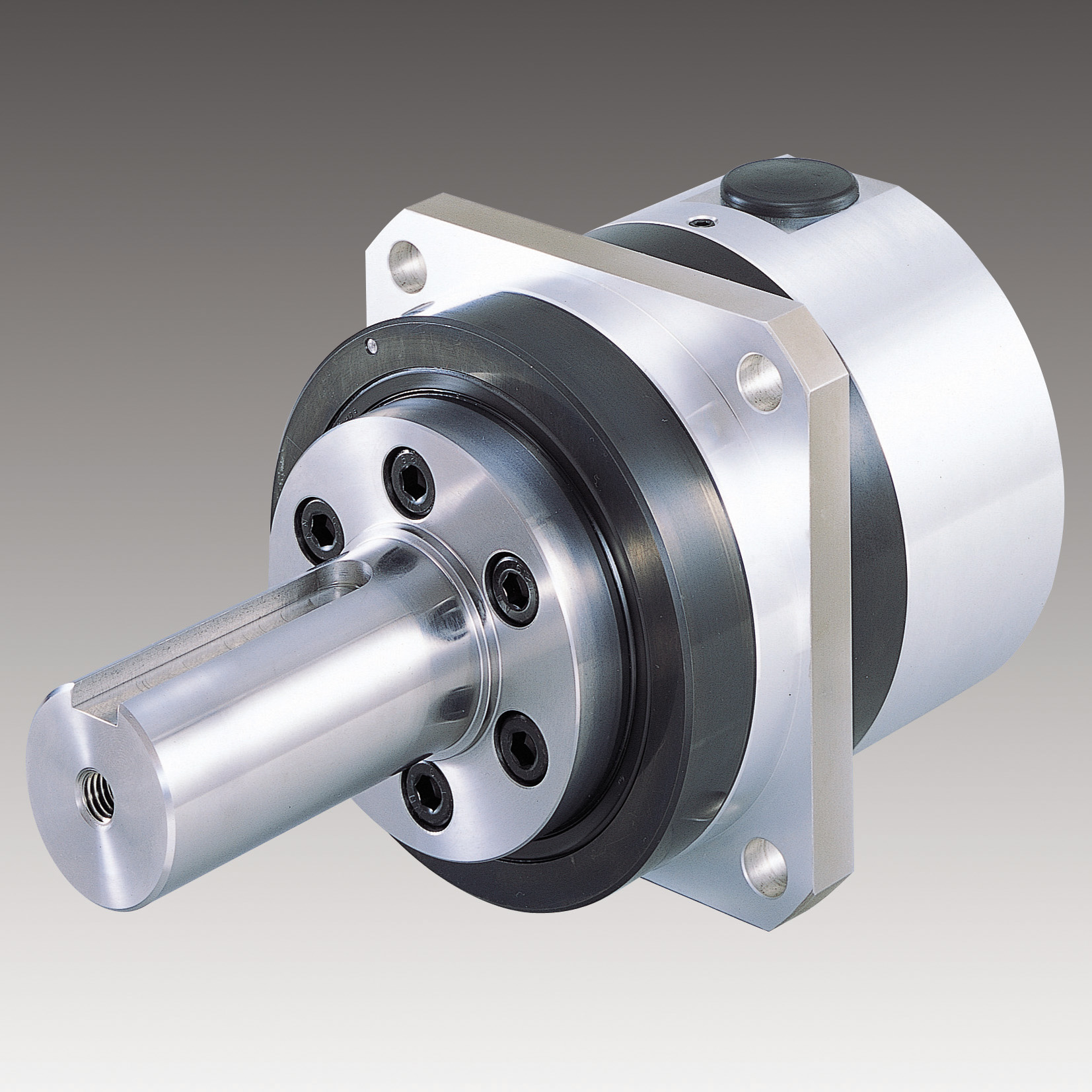
齿轮传动harmonic谐波齿轮减速机CSD-14-50-2UH是较常用的传动机构之一。齿轮元件的结构形式和质量将直接影响着传动机构的品质。随着科学技术的不断发展,对于各种机械、仪器、仪表的传动机构也提出了相应的要求。例如,在自动化机械化方面,常常要把高速旋转的电机降到很低的转速,这就需要有一个很大速比的减速机构,同时要求它的体积小、重量轻;对一些机械分度机构,既要求它结构简单,又要求它具有较高的分度准确性

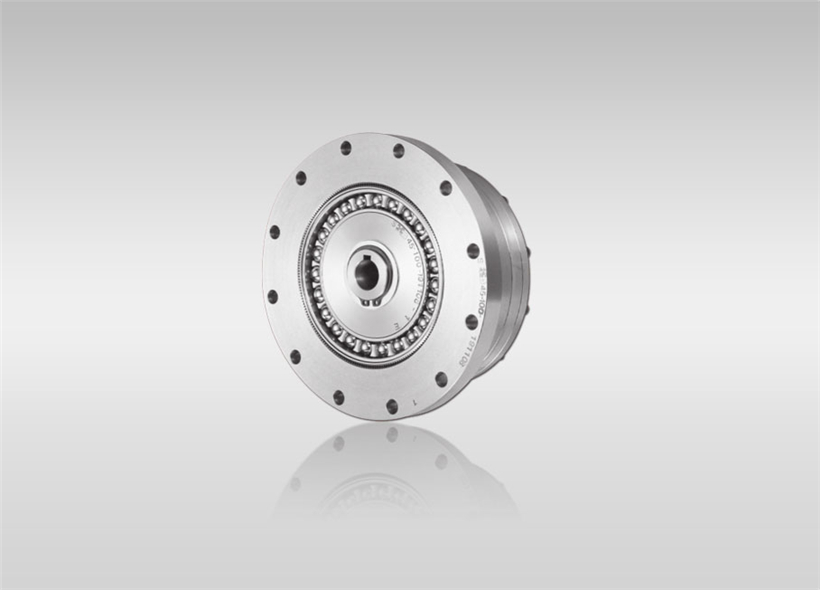
每个啮合区域轮齿接触的多付性以及波发生器的“浮动“装置运动误差降低15~20%。
波形齿轮传动运动harmonic谐波齿轮减速机CSD-14-50-2UH误差的性质本身带来一个缺点,即运动误差中高频误差起主要作用,
同时一阶谐振的振幅较小。这是因为在波形传动中(一般的说与行星传动相同)使齿轮的低频误差变换成传动装置的高频误差。

当薄壁环受弯时,中性层(中性线)位于环厚度的中间。
壳体的力矩理论先体的力矩理论是计及一切力因素的理论。它基于Kirchhoff-Love假设:
1。法线不变性假设。认为中面的法线不扭曲且依然垂直于变形后的中面。与梁的平截面假定相类似,它可以根据中面几何形状的变化来确定柔轮壁任一点的变形状态。这时研究壳体的变形便可归结为研究壳休中面的变形。
2。关于各层不相挤压的假设。认为哈默纳科机械手谐波传动SHD-14-50-2UH平行于中面的面上的法向应力等于零,亦即应力状态可看作平面应力状态。
1.径向接触轴承-公称接触角为0°的向心轴承。
2.角接触向心轴承-公称接触角为0°~45°的向心轴承。
向心球轴承安装布置方式
这种轴承一般有三种不同布置方式 :
向心轴承日本哈默纳科谐波减速机背对背式布置 (即宽边相对) ;
面对面式布置 (即狭边相对) ;
同向排列布置 (即并列) 。
它们可以成对紧靠在一起,也可用垫圈或套筒隔开 ,某些设计的布置按主轴的要求把三个以上的轴承排列在一起 。高速主轴(如内圆磨具) 大都采用单个轴承,并常用压缩弹簧来消除轴承内、外环与滚珠的间隙。
电磁离合器是利用激磁线圈的电流所产生的磁力来操纵离合器的各种接合元件,以达到接合或分离的离合器。电磁离合器有结构简单,日本哈默纳科谐波减速机CSF-11-100-1U起动力矩大,离合迅速,安装维修方便,使用寿命长,操纵方便等优点
http://harmonicdrivee.com