布局形式输入输出同轴
安装形式立式卧式
级数单级
用途工业机器
材质钢
包装原厂纸箱
在结构和运动学方面,谐波传动较之其他传动*接近于khv传动,它具有一个通过平行曲柄机构与从动轴相连的行星轮。作为与khv传动相类似的传动,把两种传动相比较,发现有以下的共同性质:两种传动均为四杆机构,其中轮沿轮滚动,而传动比可以用类似的关系式表示。

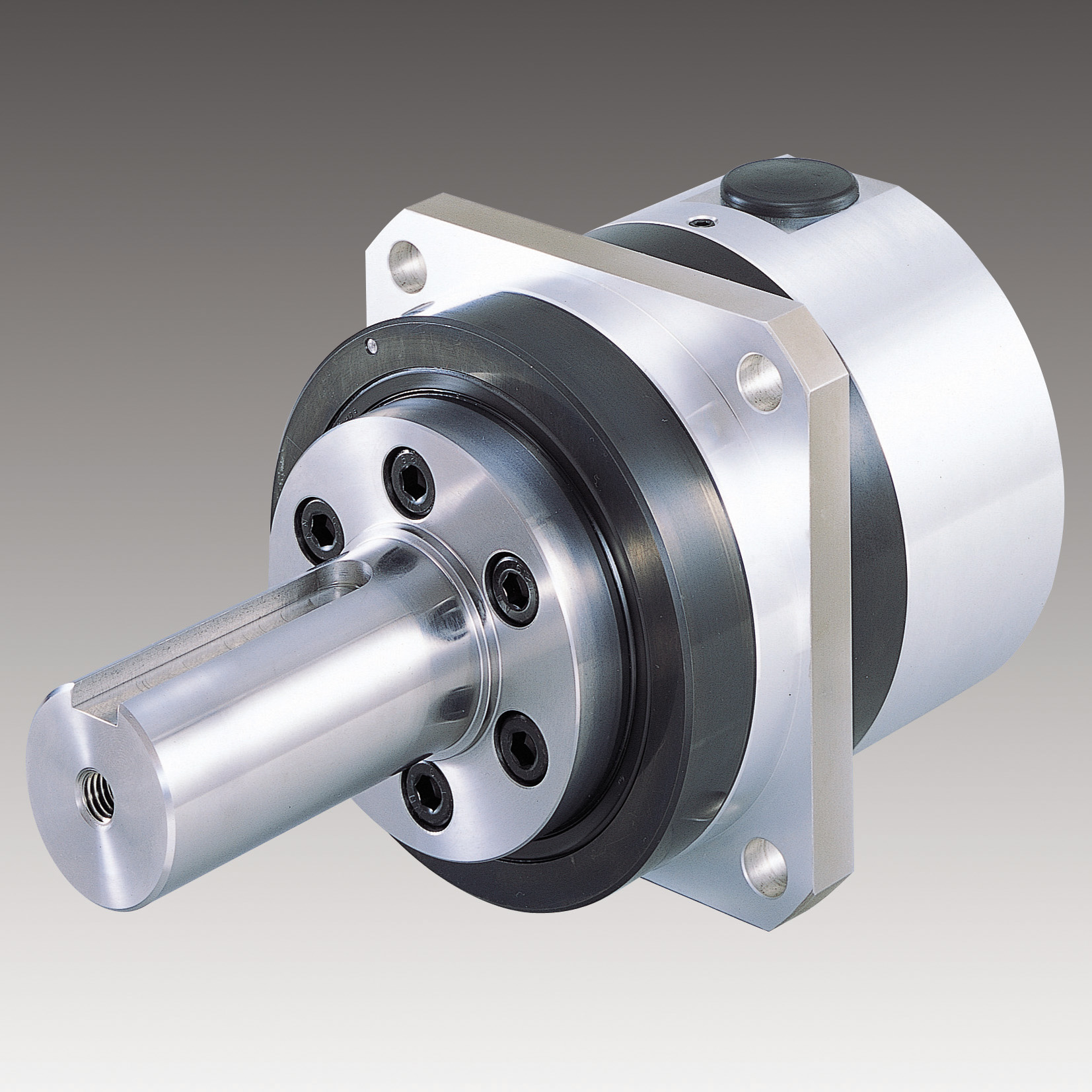
harmonic谐波齿轮减速机CSD-14-50-2UH刚轮壁厚应使在啮合力作用下其径向变形不*过0.05m。例如在USM型减速器中刚轮壁厚大约是((0.17 ~0.18)dc。为使传动装置的制造和装配简化,刚轮齿圈宽度比柔轮齿圈宽度宽。当HB240~280时,刚轮用40Cr, 40CrNi, 30CrMnSiA或其它钢种制造。

齿轮传动harmonic谐波齿轮减速机CSD-14-50-2UH是较常用的传动机构之一。齿轮元件的结构形式和质量将直接影响着传动机构的品质。随着科学技术的不断发展,对于各种机械、仪器、仪表的传动机构也提出了相应的要求。例如,在自动化机械化方面,常常要把高速旋转的电机降到很低的转速,这就需要有一个很大速比的减速机构,同时要求它的体积小、重量轻;对一些机械分度机构,既要求它结构简单,又要求它具有较高的分度准确性

波形传动的一个重要特点是,与其它传动型式比较,当其中齿轮是相同精度时,具有较小的运动误差。**是因为,在j=2的波形传动中两个轴的齿数—柔轮和刚轮—不像一般传动型式那样在一个区域啮合,而是在1个区域啮合,因此不会出现轮齿运动误差的不良数值。当j=2时,传动装置运动误差的总合不可能比齿轮运动误差的一半大,当j=3时,不可能大于齿轮运动误差总合的1/4.
电磁离合器是利用激磁线圈的电流所产生的磁力来操纵离合器的各种接合元件,以达到接合或分离的离合器。电磁离合器有结构简单,日本哈默纳科谐波减速机CSF-11-100-1U起动力矩大,离合迅速,安装维修方便,使用寿命长,操纵方便等优点
http://harmonicdrivee.com