布局形式输入输出同轴
安装形式立式卧式
级数单级
用途工业机器
材质钢
包装原厂纸箱
波形传动的一个重要特点是,与其它传动型式比较,当其中齿轮是相同精度时,具有较小的运动误差。**是因为,在j=2的波形传动中两个轴的齿数—柔轮和刚轮—不像一般传动型式那样在一个区域啮合,而是在1个区域啮合,因此不会出现轮齿运动误差的不良数值。当j=2时,传动装置运动误差的总合不可能比齿轮运动误差的一半大,当j=3时,不可能大于齿轮运动误差总合的1/4.

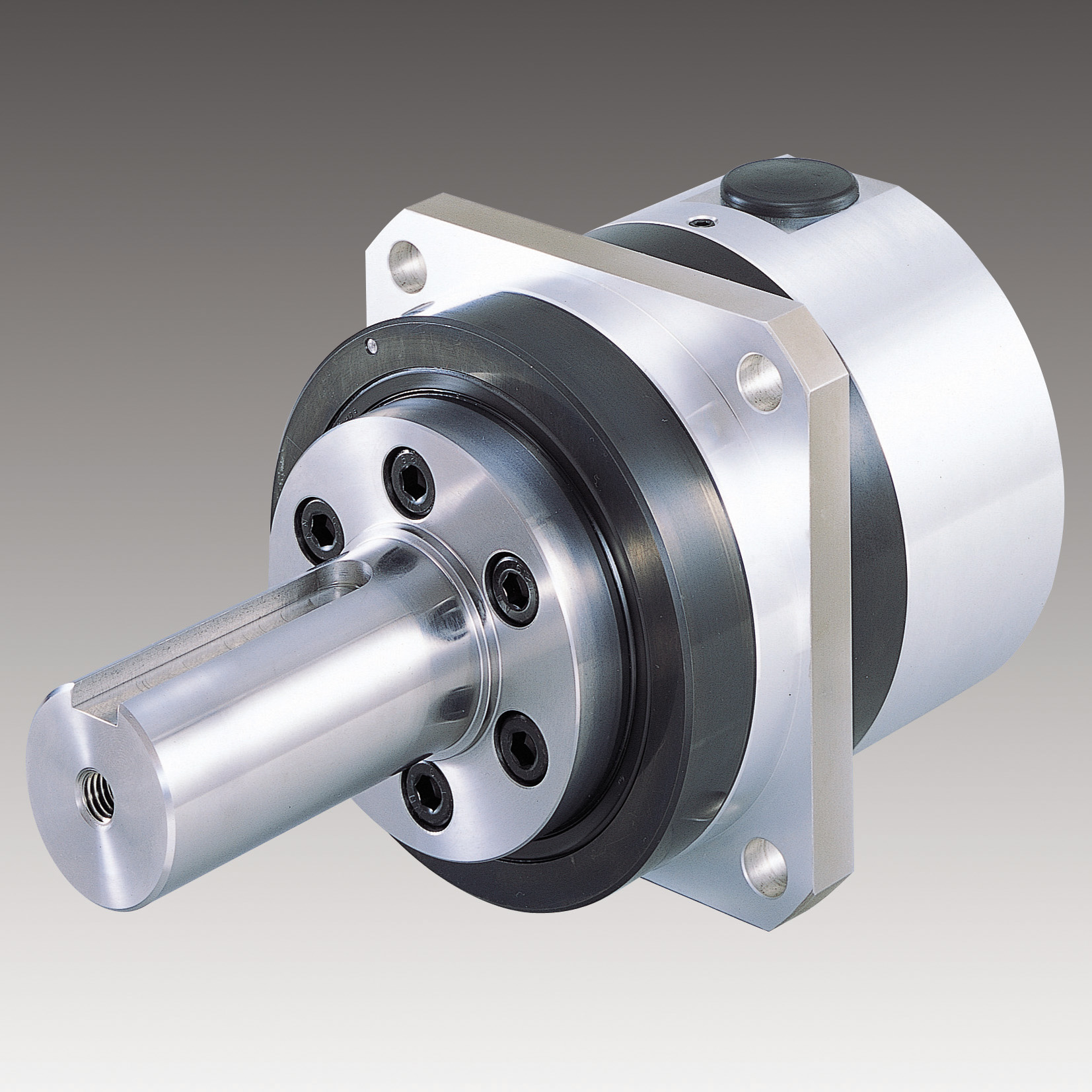
向心轴承日本哈默纳科谐波减速机
1、向心球轴承以面对面方式安装,工作时主轴由于温升作径向和轴向膨胀,但由于内环比外环伸长快,这样膨胀的结果对轴承内环产生额外的轴向负荷,亦即增加预加负荷。
2、背对背安装的主轴轴承。当轴承内环的垫圈轴向伸长时,减少了原先调整好的预加负荷。
3、同 一轴颈上的两对轴承,左、右各一对,都是作背对背安装,其中左、右靠得近的两个即中间两个轴承是面对面的 ,工作时的温升会使中间两个轴承的预加负荷 。
4、 另一种布局方式 ,安装同一轴颈上的两对轴承 ,左 、右两端 都是成对面对面地安装 。 工作时主轴由于温升作轴向伸长时,就造成外侧的两个轴承上增加了预加负荷,而 中间两个轴 承减少了预加 负荷,甚至产生了间隙。
上述四种布局都不太理想 ,存在着一定的毛病。高精度、高转速 的主轴若采用上述 四种 中的任何一种布局方式安装都会影响主轴的回转精度及轴承的寿命。正确的布局方式,两对"同向''安装的向心球轴承 ,承担切削或磨削的一端一对轴承的外环与轴 承座孔轴向是固定的 ,则 另一端一对轴承的外环与轴承座孔其轴 向脱空 ,而两端轴承内环与主轴其 轴向是固紧的,主轴无轴 向窜动 。这样,当主轴受热伸长时 ,非切削端一对轴承可以在套 筒里向中间移 动,因而补偿了主轴 的热膨胀,轴承仍保持原有的预加负荷 。
为了保证冲裁制件的质量,要求凸模和凹模具有锋利的刃口和合理的间隙。间隙一般取材料厚度的5%一10%,这样才能保证上、下裂纹相互重合,获得表面较光滑的断口。如果间隙过小或过大,则会严重影响冲裁质量,甚至损坏冲模。

当薄壁环受弯时,中性层(中性线)位于环厚度的中间。
壳体的力矩理论先体的力矩理论是计及一切力因素的理论。它基于Kirchhoff-Love假设:
1。法线不变性假设。认为中面的法线不扭曲且依然垂直于变形后的中面。与梁的平截面假定相类似,它可以根据中面几何形状的变化来确定柔轮壁任一点的变形状态。这时研究壳体的变形便可归结为研究壳休中面的变形。
2。关于各层不相挤压的假设。认为哈默纳科机械手谐波传动SHD-14-50-2UH平行于中面的面上的法向应力等于零,亦即应力状态可看作平面应力状态。
摩擦离合器.是攀主、从动部分的接合元件采用摩擦副以传递转矩,可在运转中结合,结合平稳,过载时离合器可打滑起安全保护作用。片式摩擦离合器结构比较紧凑.径向尺寸较小,调节简单可靠,常应用于汽车、拖拉机、工程机械和齿轮箱等机械中。日本哈默纳科谐波减速机CSF-11-100-1U片式摩擦离合器在机械离合器、电磁离合器、液压离合器、气压离合器中均有应用。
为了适应各种机械设备配套的需要,满足不同安装型式及多种联轴器的要求,按承受轴向力、径向力、弯曲力矩的大小及滑动速度的高低,配以装有滚动轴承和不装动轴承的适用于高、低速之分的七种结构型式。
http://harmonicdrivee.com