-
-
上海浜田实业有限公司
Shanghai Hamada Industrial Co. , Ltd.
-
全国服务咨询热线:
13162861726
Shanghai Hamada Industrial Co. , Ltd.
13162861726

产品描述
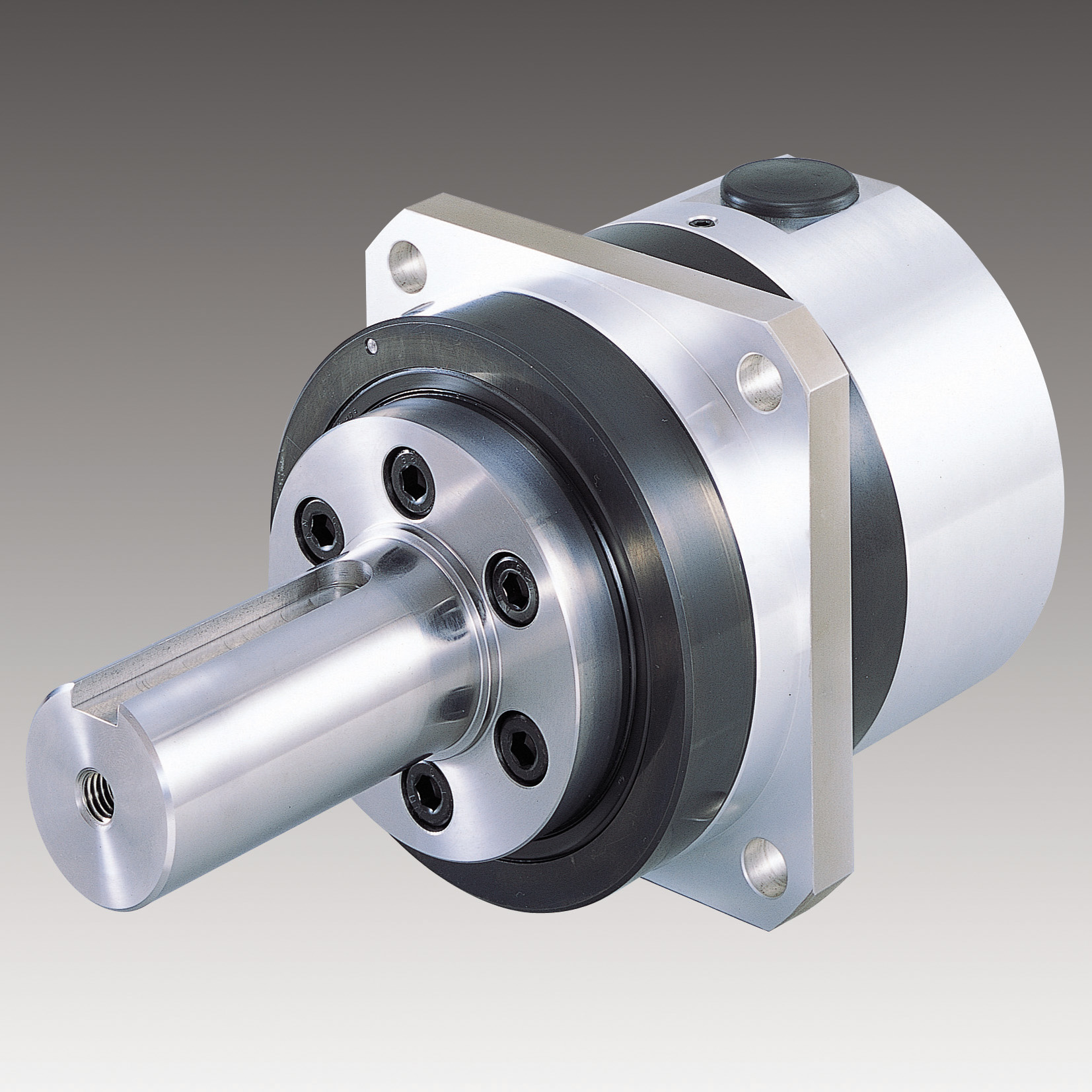
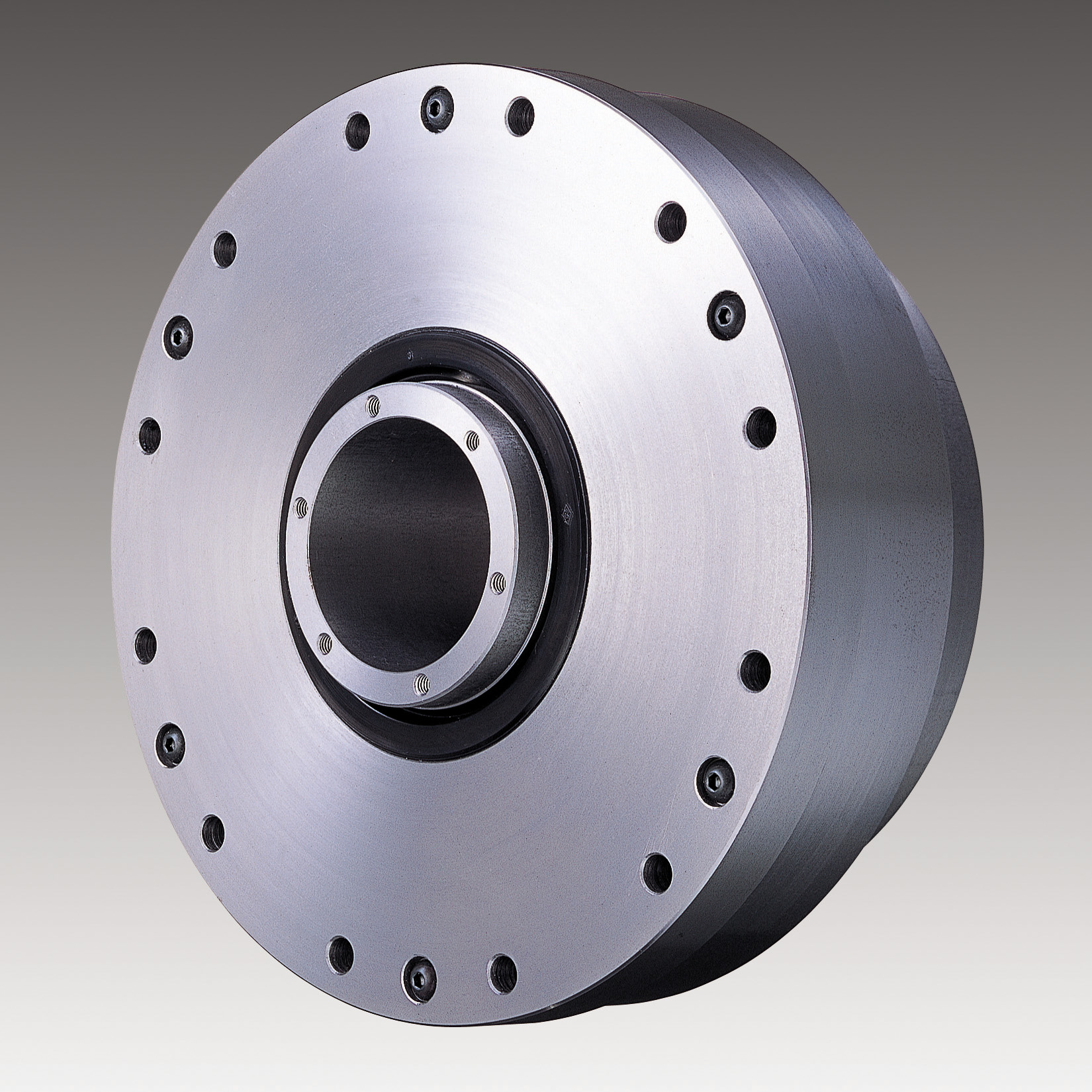
harmonic谐波齿轮减速机CSD-14-50-2UH刚轮壁厚应使在啮合力作用下其径向变形不*过0.05m。例如在USM型减速器中刚轮壁厚大约是((0.17 ~0.18)dc。为使传动装置的制造和装配简化,刚轮齿圈宽度比柔轮齿圈宽度宽。当HB240~280时,刚轮用40Cr, 40CrNi, 30CrMnSiA或其它钢种制造。
每个啮合区域轮齿接触的多付性以及波发生器的“浮动“装置运动误差降低15~20%。
波形齿轮传动运动harmonic谐波齿轮减速机CSD-14-50-2UH误差的性质本身带来一个缺点,即运动误差中高频误差起主要作用,
同时一阶谐振的振幅较小。这是因为在波形传动中(一般的说与行星传动相同)使齿轮的低频误差变换成传动装置的高频误差。
1.径向接触轴承-公称接触角为0°的向心轴承。
2.角接触向心轴承-公称接触角为0°~45°的向心轴承。
向心球轴承安装布置方式
这种轴承一般有三种不同布置方式 :
向心轴承日本哈默纳科谐波减速机背对背式布置 (即宽边相对) ;
面对面式布置 (即狭边相对) ;
同向排列布置 (即并列) 。
它们可以成对紧靠在一起,也可用垫圈或套筒隔开 ,某些设计的布置按主轴的要求把三个以上的轴承排列在一起 。高速主轴(如内圆磨具) 大都采用单个轴承,并常用压缩弹簧来消除轴承内、外环与滚珠的间隙。
背对背式布置
采用这种方式安装后,轴承的滚珠与内、外环接触点的连线,即接触角线沿着回转轴线方向扩散,因此增加了径向和轴向刚性 ,抗变形能力。
面对面式布置
用这种方式安装,轴承滚珠与内、外环的接触点的连线,即接触角线沿着回转轴线方向收敛,同时轴承内环伸出外环,当两轴承的外环压紧到一起时,外环间的原始间隙开始消除。
同向排列布置
选用这种方式安装的轴承、两个旋有预加负荷的 向心球轴承可分担工作载荷。这样的布局方式使轴承接触角线同 向而且平行,但为了保证安装的轴向稳定性,必须在轴两端分别对放两个同向排列轴承。
摩擦离合器.是攀主、从动部分的接合元件采用摩擦副以传递转矩,可在运转中结合,结合平稳,过载时离合器可打滑起安全保护作用。片式摩擦离合器结构比较紧凑.径向尺寸较小,调节简单可靠,常应用于汽车、拖拉机、工程机械和齿轮箱等机械中。日本哈默纳科谐波减速机CSF-11-100-1U片式摩擦离合器在机械离合器、电磁离合器、液压离合器、气压离合器中均有应用。
为了适应各种机械设备配套的需要,满足不同安装型式及多种联轴器的要求,按承受轴向力、径向力、弯曲力矩的大小及滑动速度的高低,配以装有滚动轴承和不装动轴承的适用于高、低速之分的七种结构型式。
手机网站

微信号码
地址:上海市 嘉定区 江桥镇 上海市嘉定区爱特路877号商务园D栋510室
联系人:张俊杰先生(销售部经理)
微信帐号:13162861726








